| Problem:
The goal of stereo vision is to extract depth information of a scene using two different points of view. Generally this is achieved using two cameras placed side by side. Research on stereo vision has mainly focused on the processing of images taken by this kind of sensor. A lot of work has been done on the matching problem, reconstruction and high-level understanding, for example. Few studies, however, have focused on the basis of a stereo system : the stereo sensor.
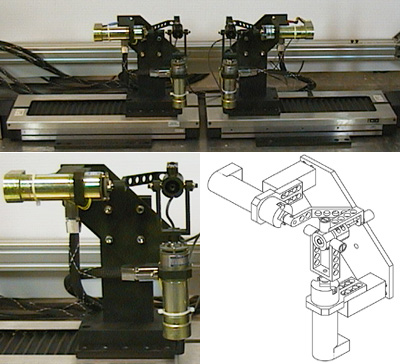
In this context, a new versatile stereo pair called the agile stereo pair (ASP) has been developed by the Computer Vision and Systems Laboratory (CVSL) with the collaboration of the Robotics Laboratory of the Mechanical Engineering Department of Laval University. This new sensor is able to dynamically orient its two cameras in a quick and accurate fashion as well as continuously change its baseline. Moreover, the ASP has a compact design.
The depth information extraction with a stereo pair requires the knowledge of the position of the two cameras relative to each other. This is referred to as the extrinsic parameters. With a standard stereo pair, these parameters are estimated by a unique calibration procedure. Due to the mobility of the cameras of the ASP, the extrinsic parameters are ever changing. The classical approach thus cannot be applied to the new sensor. A new procedure allowing the determination of the extrinsic parameters at any given time must therefore be developed in order to use the ASP for depth information extraction.
|