| Problème:
L'objectif de la "vision stéréoscopique" est d'extraire l'information de profondeur d'une scène en l'observant de deux points de vue différents. Pour y arriver, on utilise en général deux caméras placées côte à côte. Beaucoup de travaux ont été réalisés par rapport au traitement des images acquises à l'aide de ce type de capteur. Ils portent principalement sur les problèmes d'appariement, de reconstruction, et d'interprétation de haut niveau. Toutefois, peu de chercheurs se sont penchés sur l'amélioration de l'élément de base d'un système stéréo : le capteur.
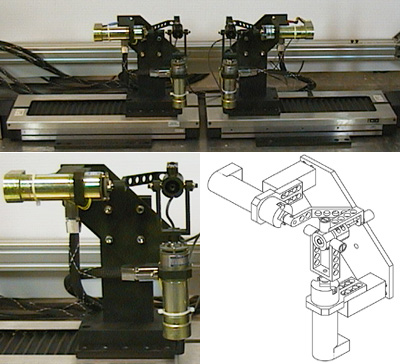
C'est pour palier au manque de capteur stéréoscopique versatile dont pourraient bénéficier plusieurs secteurs du domaine de la vision numérique que le Laboratoire de Vision et Systèmes Numériques (LVSN) et le Laboratoire de Robotique du Département de génie mécanique de l'Université Laval ont développé conjointement la paire stéréo agile (PSA). Ce nouveau capteur permet d'orienter dynamiquement ses deux caméras de façon rapide, précise et indépendante en plus d'offrir un ajustement continu de son baseline. Il présente de surcroît un design compact.
L'extraction de l'information de profondeur à l'aide d'une paire stéréo nécessite la connaissance de la position relative des deux caméras, appelés les paramètres extrinsèques. Avec une paire stéréo standard, ces paramètres sont déterminés lors d'une étape unique de calibrage. Étant donné la mobilité des caméras de la PSA, cette approche ne peut être utilisée pour ce nouveau capteur. L'utilisation de la PSA est donc conditionnelle à la mise au point d'une méthode permettant de déterminer la position relative de ses caméras à tout moment.
|