| Description of a moving person observed by a multi-camera system |
| Masters |
| Stéphane Drouin |
Marc Parizeau (Supervisor)
Patrick Hébert (Co-supervisor) |
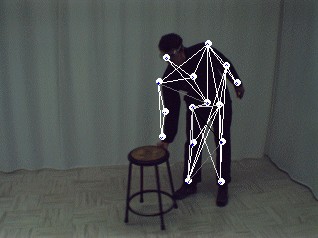 |
| Problem: The description of a person and of his actions must be available in order to model and to recognize his behaviour. The goal of this project is to produce a stable description in three-dimensional space (3D) from a sequence of images acquired by a calibrated and synchronized multi-camera system. |
| Motivation: This project is presented in the context of COGNOIS, for which one of the objectives is to acquire, to describe and recognize the behaviours of people. All available information at the time of acquisition, e.g. the calibration and synchronization parameters of the cameras, is used in order to produce the 3D temporal description of a person, for a multi-camera sequence. The results could be used as ground truth to evaluate other methods not using all this information. This description will serve for a later stage of movement analysis. |
| Approach: First, networked cameras are calibrated with a moving pattern and synchronized with a specialized electronic circuit. We suppose that the calibration parameters do not change for the acquisition period. Second, the parameters of a skeletal representation the model of a person are estimated in 3D space. Feedback from the model in each image allows a simple segmentation to isolate feature points on the subject. The invariant elements of the description the limb lengths are filtered to produce the final result. An approach based on the extended Kalman filter is used for this purpose. For the segmentation, we suppose that distinctive feature points are present on the subject. We also suppose that only one person is present in the scene. |
| Challenges: The calibration of a wide area vision system poses significant practical challenges. The suggested solutions usually use cumbersome calibration patterns and ignore the synchronization. The main challenge is to develop a precise and efficient calibration procedure that will adapt to a broad range of camera configurations.
The 3D description of a person is generally made by fitting a model specific to each individual. The challenge here is to propose a method using a generic model of a person whose invariant elements are estimated by observation. To ensure the robustness of the segmentation to occlusions is also a challenge. |
| Applications: Description and tracking of people is useful in many applications, such as the monitoring of a swimming pool, the analysis of a sport movement like a golf swing, or of video games where the player physically takes part in the action. |
| |
| Calendar: May 2001 - December 2002 |
| Support: NSERC |
| Web reference: http://vision.gel.ulaval.ca/~sdrouin/tracking/ |
| Last modification: 2008/01/28 by sdrouin |

