| Description dune personne en mouvement observée par un système multi-caméras |
| Maîtrise |
| Stéphane Drouin |
Marc Parizeau (Directeur)
Patrick Hébert (Codirecteur) |
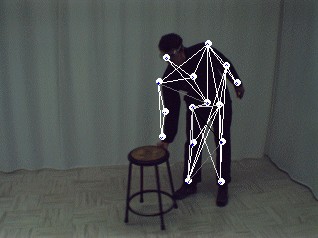 |
| Problème: La description dune personne et de son mouvement doit être disponible afin de modéliser et de reconnaître son comportement. Le but de ce projet est de produire une description en trois dimensions (3D) stable pour une séquence dimages acquise par un système multi-caméras calibré et synchronisé. |
| Motivation: Ce projet sinscrit dans le cadre de COGNOIS, dont un des objectifs est de saisir, de représenter et de reconnaître les comportements de personnes. Toute linformation disponible au moment de lacquisition, notamment les paramètres de calibrage et de synchronisation des caméras, est utilisée afin de produire la description temporelle 3D dune personne, pour une séquence multi-vues. Les résultats pourront être utilisés comme base de comparaison pour évaluer des méthodes nexploitant pas toutes ces informations. Cette description servira pour une étape ultérieure danalyse du mouvement. |
| Approche: Premièrement, un ensemble de caméras sont calibrées au moyen d'une cible mobile et synchronisées par un circuit spécialisé. On suppose que les paramètres de calibrage ne changent pas en cours dacquisition. Deuxièmement, les paramètres d'une représentation squelettique le modèle dune personne sont obtenus dans lespace. La rétroaction du modèle dans chaque image permet une segmentation simple qui isole des points dintérêt sur une personne. Les éléments invariants de la description la longueur des membres sont stabilisés pour produire le résultat final. Une approche basée sur le filtre de Kalman généralisé est utilisée à cette fin. Pour la segmentation, on suppose que des points dintérêt distinctifs sont présents sur le sujet. On suppose également quune seule personne est présente dans la scène. |
| Défis: Le calibrage dun système de vision dans un grand volume pose des défis pratiques importants. Les solutions proposées utilisent parfois des cibles encombrantes et ignorent souvent les aspects de synchronisation. Le plus grand défi est de développer une procédure de calibrage précise et efficace qui accommodera un large éventail de configurations des caméras.
La description dune personne en 3D se fait généralement par des méthodes dajustement dun modèle spécifique à chaque individu. Le défi ici est de proposer une méthode utilisant un modèle générique de personne dont les éléments invariants sont estimés par lobservation. Assurer la robustesse de la segmentation face aux occultations est également un défi de taille. |
| Applications: Les systèmes de description et de suivi de personnes sont utiles dans bien des applications. On pense à la surveillance dune piscine, à lanalyse de mouvement de sports comme un élan de golf, ou à des jeux vidéo où le joueur participe physiquement à laction. |
| |
| Calendrier: Mai 2001 décembre 2002 |
| Support: CRSNG |
| Référence web: http://vision.gel.ulaval.ca/~sdrouin/tracking/ |
| Dernière modification: 2008/01/28 par sdrouin |

