Nicholas Heckman, Jean-François Lalonde, Nicolas Vandapel, and Martial Hebert
Abstract
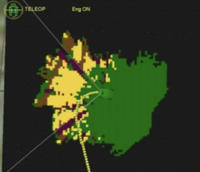
In this paper, we present an approach for potential negative obstacle detection based on missing data interpretation that extends traditional techniques driven by data only which capture the occupancy of the scene. The approach is decomposed into three steps: three-dimensional (3-D) data accumulation and low level classification, 3-D occluder propagation, and context-based occlusion labeling. The approach is validated using logged laser data collected in various outdoor natural terrains and also demonstrated live on-board the Demo-III eXperimental Unmanned Vehicle (XUV).
Citation
Nicholas Heckman, Jean-François Lalonde, Nicolas Vandapel and
Martial Hebert.
Potential Negative Obstacle Detection by Occlusion Labeling.
IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2007
[
PDF], [
BibTeX]
Jean-François Lalonde, Nicolas Vandapel, Daniel F. Huber and Martial Hebert
Abstract
In recent years, much progress has
been made in outdoor autonomous navigation. However, safe navigation
is still a daunting challenge in terrain containing vegetation. In
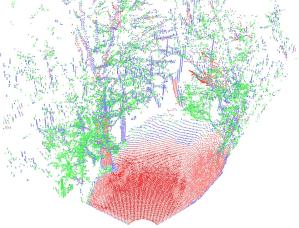
this paper, we focus on the segmentation of ladar data into three
classes using local three-dimensional point cloud statistics. The
classes are: "scatter" to represent porous volumes such as grass and
tree canopy; "linear" to capture thin objects like wires or tree
branches, and finally "surface" to capture solid objects like ground
surface, rocks, or large trunks. We present the details of the
proposed method, and the modifications we made to implement it
on-board an autonomous ground vehicle for real-time data
processing. Finally, we present results produced from different
stationary laser sensors and from field tests using an unmanned ground
vehicle.
Citation
Jean-François Lalonde, Nicolas Vandapel, Daniel F. Huber and
Martial Hebert.
Natural Terrain Classification using Three-Dimensional Ladar Data for Ground Robot Mobility.
Journal of Field Robotics, 23(10):839--861, October 2006.
[
PDF], [
BibTeX]
Jean-François Lalonde, Christopher P. Bartley and Illah Nourbakhsh
Abstract

The
Mobile Robot Programming course has been taught at
Carnegie Mellon University for the past twelve years. It is a
problem-driven class designed for students with little or no
experience with robots. In this paper, we first present the current
status of the class, and show how it improves the education and
training of students in a robotics curriculum by giving them a
hands-on experience with a real robot. We show that, in addition to
core subjects such as perception, action and cognition, students
also have the opportunity to learn advanced topics such as
reinforcement learning and multi-robot coordination. We then discuss
the evolution of the class under general categories: hardware and
programming environment, team experiments, and assignments. We
present important lessons learned in each category, and how they
affect the learning experience of participating students. We
conclude by discussing future opportunities.
Citation
Jean-François Lalonde, Christopher P. Bartley and Illah Nourbakhsh.
Mobile Robot Programming in Education.
International Conference on Robotics and Automation, 2006. [
PDF], [
BibTeX]
Talk
Download the slides from the talk presented at ICRA'06 in [
MS Powerpoint (2.5 MB)] and [
PDF (1.4 MB)].
Jean-François Lalonde, and Alexei A. Efros
Abstract

Environment mapping is a popular technique for creating consistent
lighting when compositing a virtual object into a real scene.
However, capturing an environment map usually requires physical
access to the scene to obtain illumination measurements. But what if
all one has available is a single photograph of the scene? In this
paper, we study techniques for synthesizing
plausible
environment maps from a single image. By analogy with texture
synthesis, the goal is to use the small amount of available data to
generate an environment map that would be likely to have come from
that scene. In particular, we are interested in understanding the
role of geometric information in constructing visually realistic
environment maps. To this end, we implement several environment
synthesis strategies that employ varying amounts of 3D scene
geometry information. We measure the quality of the synthesized
results by using human subjects to evaluate the appearance of
objects illuminated with different environment maps, in still images
as well as in video.
Citation
Jean-François Lalonde, and Alexei A. Efros.
Synthesizing Environment Maps from a Single Image. Tech. report CMU-RI-TR-10-24, Robotics Institute, Carnegie Mellon University, July, 2010. [
PDF], [
BibTeX]
Jean-François Lalonde, Nicolas Vandapel and Martial Hebert
Abstract
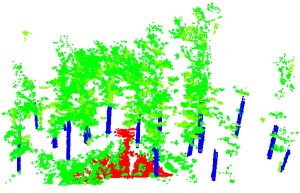
In this paper, we propose an approach that enables automatic, fast
and accurate tree trunks segmentation from three-dimensional (3-D)
laser data. Results have been demonstrated in real-time on-board a
ground mobile robot. In addition, we propose an approach to estimate
tree diameter at breast height (dbh) that was tested off-line on a
variety of ground laser scanner data. Results are also presented for
detection of tree trunks in aerial laser data. The underlying
techniques using in all cases rely on 3-D geometry analysis of point
clouds and geometric primitives fitting.
Citation
Jean-François Lalonde, Nicolas Vandapel and Martial Hebert.
Automatic Three-Dimensional Point Cloud Processing for Forest Inventory. Tech. report CMU-RI-TR-06-21, Robotics Institute, Carnegie Mellon University, July, 2006. [
PDF], [
BibTeX]
Jean-François Lalonde and Jean-Philippe Lajoie-Dorval
Abstract

The goal of this project is to identify important concepts related to the design of augmented-reality navigation systems for ground vehicles. To do so, we first present a state of the current existing technologies, especially the head-up and head-mounted displays. We then present a prototype that has been developed to simulate the system. This allows the study of important factors related to the graphical display of information to the user. The system is tested using various scenarios illustrating its use. Finally, we also developed a real prototype, using a commercial GPS, IMU and webcam. We then apply the algorithms developed previously to this data, and analyze the effect of noise on the end result. Finally, some improvements to the system are proposed. [
PDF]