Learning to Estimate Indoor Lighting from 3D Objects
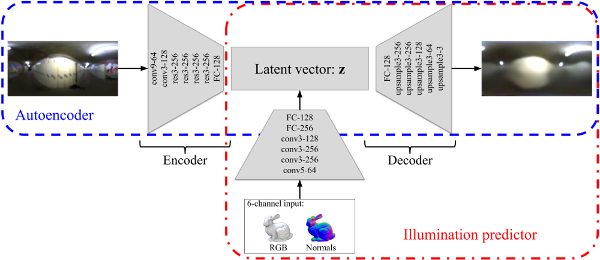
In this work, we propose a step towards a more accurate prediction of the environment light given a single picture of a known object. To achieve this, we developed a deep learning method that is able to encode the latent space of indoor lighting using few parameters and that is trained on a database of environment maps. This latent space is then used to generate predictions of the light that are both more realistic and accurate than previous methods. To achieve this, our first contribution is a deep autoencoder which is capable of learning the feature space that compactly models lighting. Our second contribution is a convolutional neural network that predicts the light from a single image of a known object. To train these networks, our third contribution is a novel dataset that contains 21,000 HDR indoor environment maps. The results indicate that the predictor can generate plausible lighting estimations even from diffuse objects.