This dataset contains 295 RGB-D (Kinect V2) sequences with ground truth 6-DOF pose annotation for 11 objects. The 3D models with high resolution geometry and texture are also provided. For each objects, 12 sequences are used to evaluate jittering, 11 sequences for robustness to occlusion and 4 sequences for free interactions between a person and the object.
We also provide real images with annotations for methods who need a training dataset, and a small sample of the dataset.
Download Training Data (1.6 GB) Download Dataset Sample (583 MB)Paper
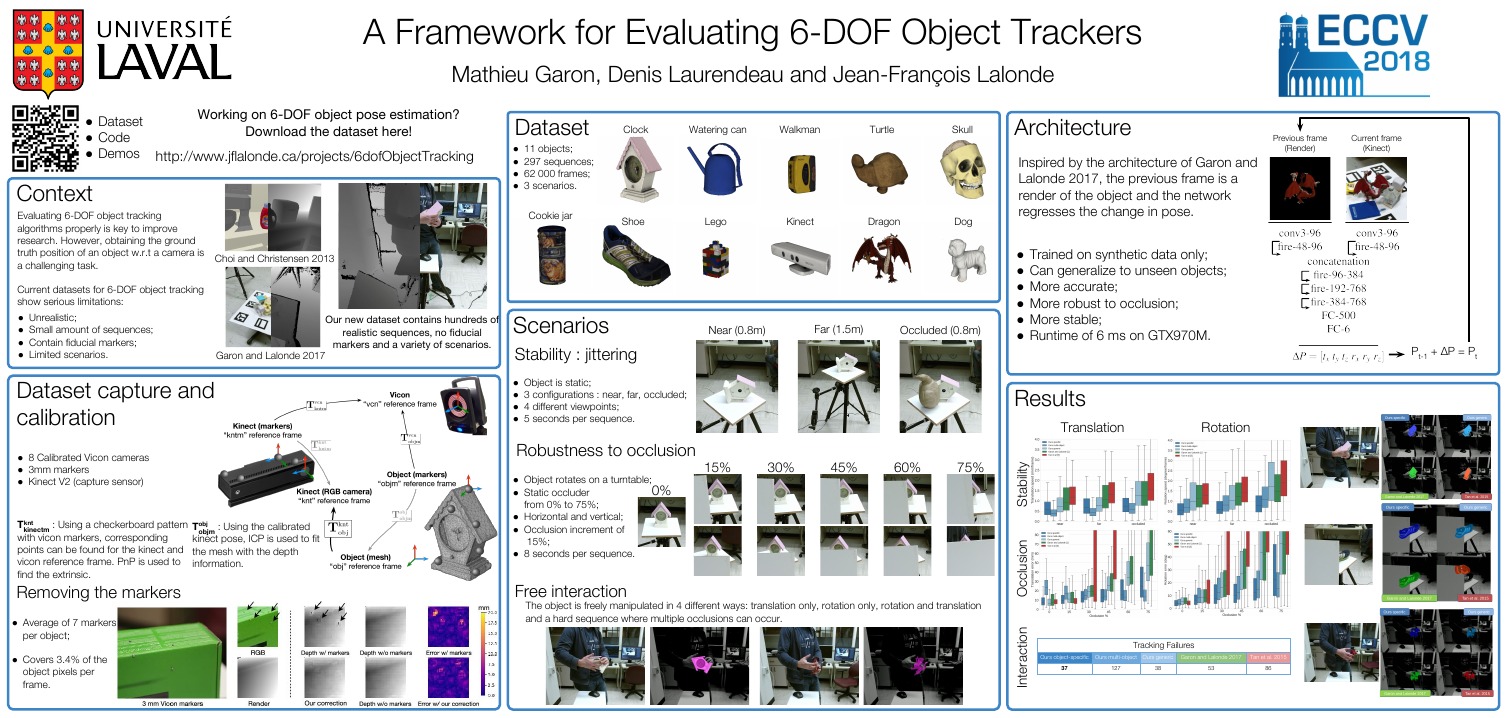
Mathieu Garon, Denis Laurendeau and Jean-François LalondeA Framework for Evaluating 6-DOF Object Trackers
European Conference on Computer Vision (ECCV), 2018
[arXiv:1803.10075 pre-print] [BibTeX]
Poster
Acknowledgements
- Jonathan Gilbert and Sylvain Comtois for their help with data acquisition;
- NSERC/Creaform Industrial Research Chair on 3D Scanning: CREATION 3D for the funding;
- NVIDIA Corporation with the donation of the Tesla K40 and Titan X GPUs used for this research.