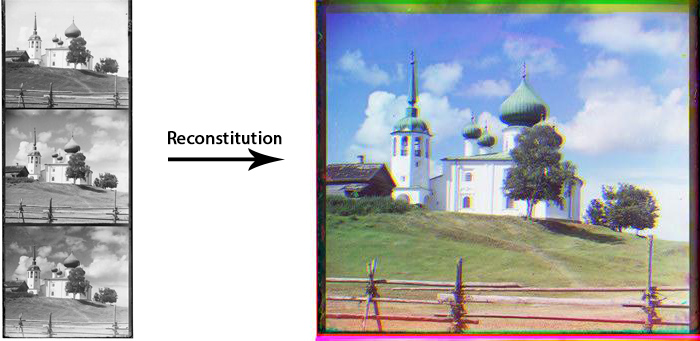
Sergei Mikhailovich Prokudin-GorskiiIl est un photographe russe qui a laissé une empreinte unique de la Russie du début du XXe siècle. À une époque ou l'appareil photo couleur n'existait pas encore, il a mis au point un appareil permettant de prendre successivement 3 photos à travers 3 filtre : un rouge, un vert, et un bleu. En projetant ces 3 images avec des spots lumineux dans des salles d'exposition, il arrivait à reconstituer des images en couleur par synthèse additive.
Le but du TP est de reconstituer les images couleurs à partir des plaques de verre numérisées de la collection de Prokudin-Gorskii. Une plaque est composée de 3 images et chacune va correspondre à un canal de couleur. Du haut vers le bas on a dans l'ordre le canal B, G et R.
norm((I2-I1),2) de Matlab
Une autre méthode, utilisée en traitement du signal, consiste à calculer le coefficients de corrélation entre les 2 signaux. Pour 2 matrices l'expression devient :
$$ {r_{I1,I2} =\frac{C_{I1,I2}}{\sigma_{I1}.\sigma_{I2}} =\frac{\sum_m \sum_n (\mathbf{I}_1(m,n)-\mu_{1})(\mathbf{I}_2(m,n)-\mu_{2})}{\sqrt {\sum_m \sum_n (\mathbf{I}_1(m,n)-\mu_{1})^2 \sum_m \sum_n (\mathbf{I}_2(m,n)-\mu_{2})^2} }} $$
$$ \mu_{1} = \text{Moyenne de I1} $$ $$ \mu_{2} = \text{Moyenne de I2}$$
Ici il faudra maximiser le coefficient de corrélation (pour une corrélation parfaite r = 1). On utilise la fonction corr2(I1,I2) de Matlab.
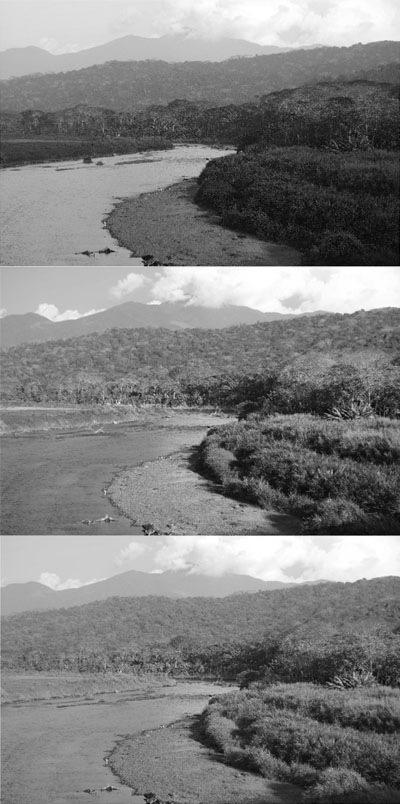
Après plusieurs essais, on se rend compte que la methode de corrélation est plus efficasse. Cependant, après différents tests sur des images à haute résolution on s'apercoit que l'alignement n'est pas parfait. Et pour cause, le critère de comparaison utilisé n'est pas très judicieux. En effet, si la photos comporte des objets de couleur blancs ou gris, cela fonctionne car chaque canal va apporter une quantité d'information equivalente à cet endroit. Mais si on imagine une forêt verte avec un ciel bleu, les informations contenues dans ces 2 canal de couleur n'ont plus rien en commun et cela ne fonctionne plus.
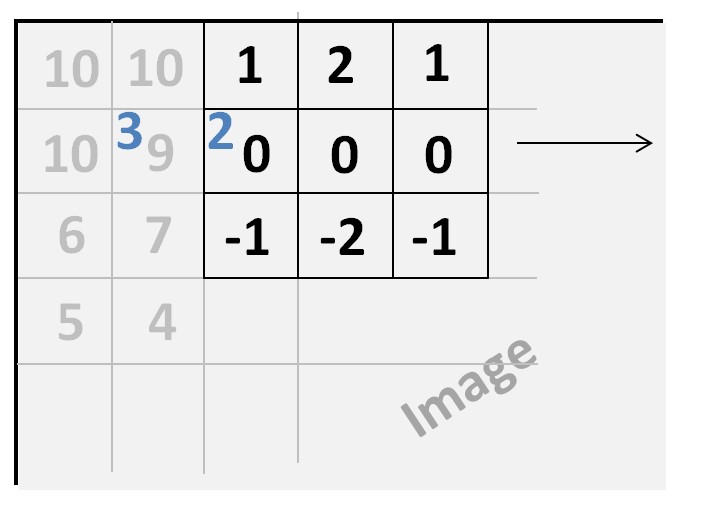
Une autre méthode consiste à detecter les objets de la scène. On détecte les bordures des objets pour chaque canal, et on réalise une comparaison de "forme". Donc ici la première chose qui viens à l'esprit c'est l'utilisation d'un filtre passe-haut. On conserve les hautes fréquences c'est à dire dans le cas d'une image, les gradients de teinte importants entre pixels.
Dans un premier temps j'ai créé un filtre passe-haut simple (fonction HighPassFilter.m) :

edge(I1, 'sobel', 'nothining').Par défaut la direction de detection des crêtes est en 'both', c'est à dire qu'on détecte à la fois les crêtes horizontales et verticales. En dessous on peut voire côte a côte le spectre de la matrice de detection dans la plage [-15, 15] affiché grace à une fonction (AffichageMatrice.m) qui m'a été utile durant l'elaboration de l'algorithme d'alignement. Le premier spectre correspond à l'utilisation de la méthode L2, le second à la méthode de corrélation, le troisième au filtrage passe-haut + corrélation, le quatrième au filtrage de Sobel + corrélation. Pour le premier c'est la valeur minimale (L2), pour le reste c'est la valeur maximale (Corrélation) :
Exemple 1


MatriceDetection(I1, I2, inter, 'Corr')ou ici I1 est l'image dépacé, I2 est l'image de référence (canal R), 'inter' est la zone de déplacement (dplc de [-inter,+inter]), et 'Corr' est la méthode de corrélation. I1 et I2 ont été au préalable filtrées par la methode de Sobel.
 00757v.jpg |  00888v.jpg |  00106v.jpg |  00889v.jpg |  00907v.jpg |  00911v.jpg |  01031v.jpg |  01657v.jpg |  01880v.jpg |  00072v.jpg |
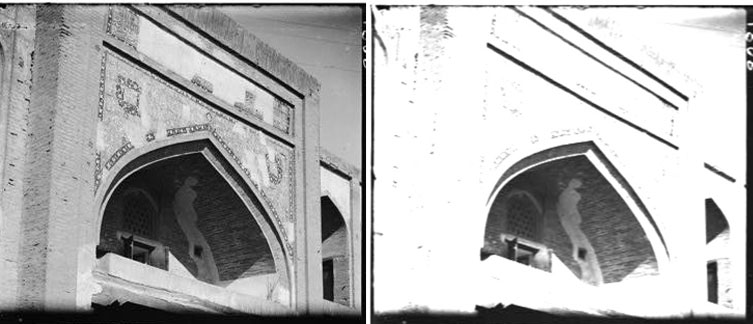
edge(I1, 'sobel', 'vertical','nothining'), on obtient une bonne superposition :
| 00106v.jpg |  00106v.jpg avec dectection 'vertical' |
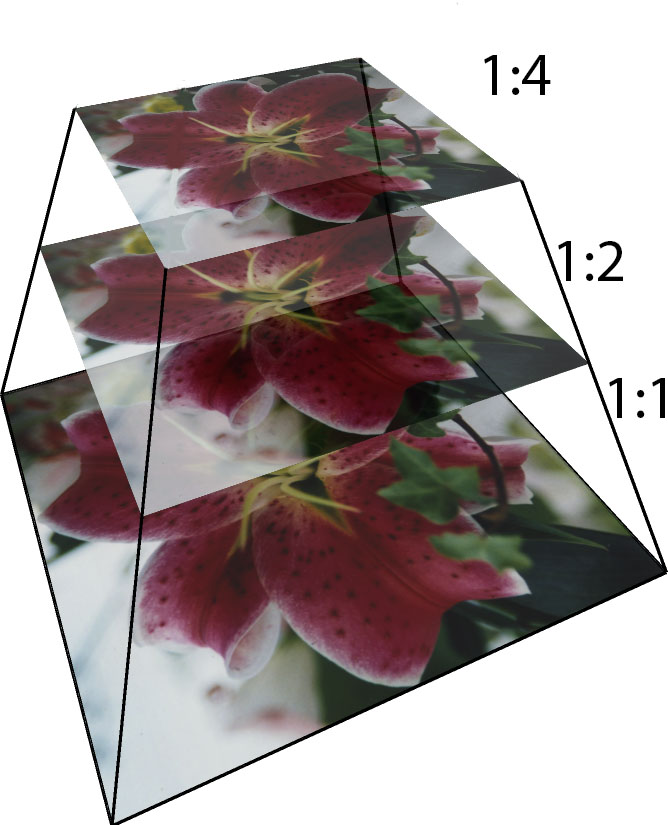
resize(I1, echelle) de Matlab. On commence à l'echelle 1:4, on applique notre algorithme pour une zone [-30,30] car l'mage a une résolution 2x plus grande que les images faibles résolutions. On sauvegarde nos vecteurs de deplacement vG et vB dans des tableaux et on les applique à l'image à l'echelle 1:2, en prenant soin de les multiplier par 2 (car la résolution est 2x plus grande). On réitère l'opération dans une boucle jusqu'au deplacement à l'echelle 1:1. Les intervalles de deplacement choisis sont respectivement [-16,16] et [-6,6] pour les echelles 1:2 et 1:1, de manière à accélerer le traitement. A la fin on calcul notre vecteur de deplacement global pour les canal G et B.
$$ v_{G}^{Global} = 4.v_{G}^{1:4} + 2.v_{G}^{1:2} + v_{G}^{1:1}$$
$$ v_{B}^{Global} = 4.v_{B}^{1:4} + 2.v_{B}^{1:2} + v_{B}^{1:1} $$
Voici quelques résultats :
 result-00737u.jpg |  result-00087u.jpg |  result-00458u.jpg |  result-01043u.jpg |  result-00892u.jpg |  result-00822u.jpg |  result-01047u.jpg |  result-00029u.jpg |  result-00128u.jpg |  result-00052u.jpg |  result-00053u.jpg |  result-00120u.jpg |  result-00122u.jpg |  result-00124u.jpg |  result-00667u.jpg |  result-00299u.jpg |  result-00300u.jpg |  result-00303u.jpg |  result-00306u.jpg |  result-01680u.jpg | 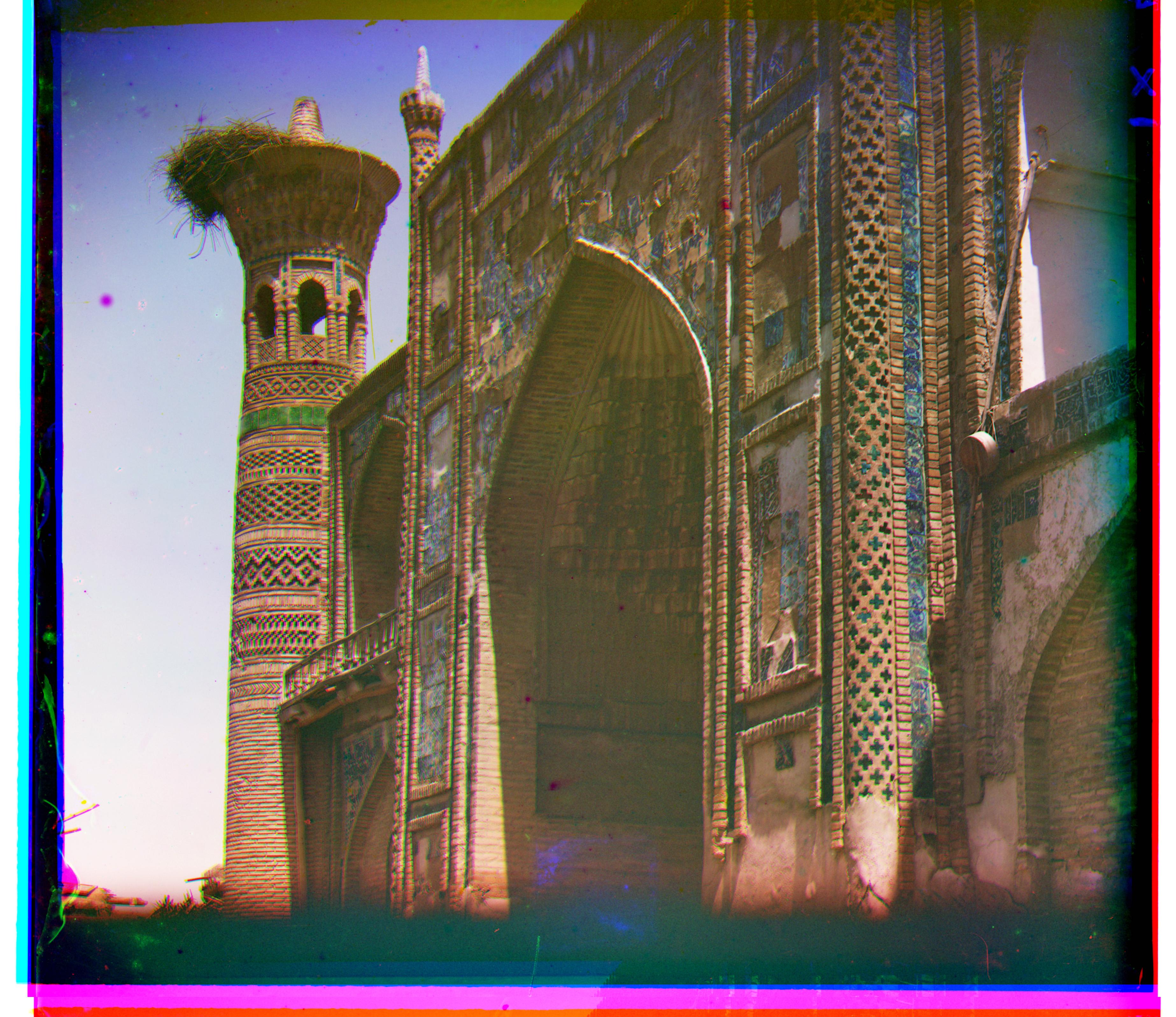 result-00001u.jpg |  result-00022u.jpg |
Edgeless(Image) qui renvoie l'image sans bordure. Pour détecter les bordures, on applique la méthode de Sobel aux 3 canal de couleur qui ont été préalablement alignés. La ligne de contraste entre la bordure noire et l'image sera detecté par le filtre. Ensuite on fait une boucle pour chaque côté de l'image en s'autorisant de supprimer jusquà 12% de l'image par côté. On fait ceci pour les 3 canal indépendament. Le nouveaux découpage de l'image s'effectura sur les valeurs minimales ou maximales des coordonnées de decoupage des 3 canal. La detection se fait seulement si les bordures sont rectilignes sur une dizaine de pixels. En pratique cela marche plutot bien, certaines bordures obliques ne sont pas détecté mais il est préferable de detecter les bordures réelles que d'effectuer une mauvaise detection et de supprimer une trop grand partie de l'image.
Voici quelques résultats :
 result-00016u.jpg |  result-00016u-Edgeless.jpg | result-01043u.jpg |  result-01043u-Edgeless.jpg |  result-00125u.jpg |  result-00125u-Edgeless.jpg | result-00001u.jpg | 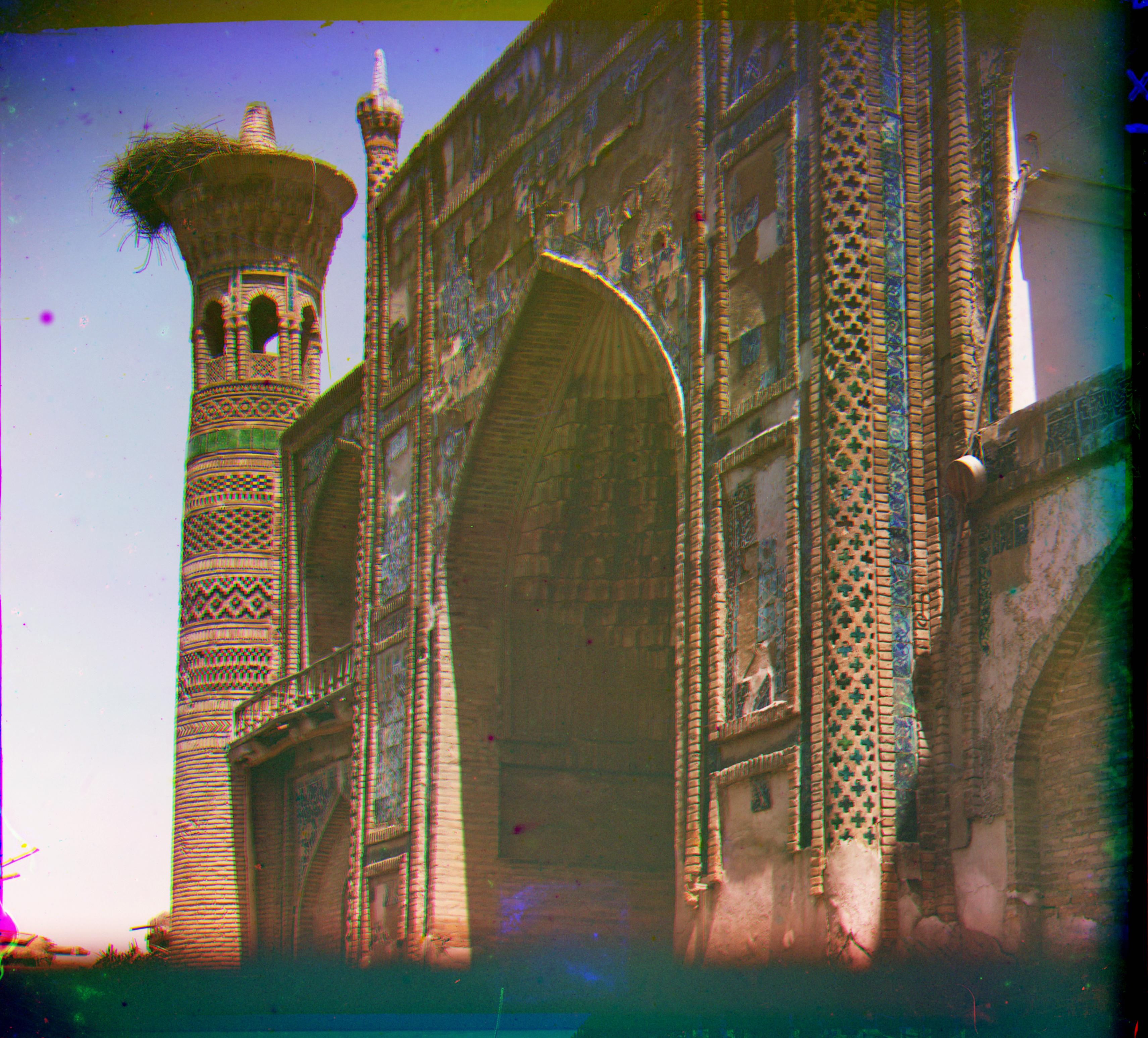 result-00001u-Edgeless.jpg | result-00122u.jpg |  result-00122u-Edgeless.jpg |
EqualizeImage(Image) qui renvoie l'image ajustée. On ajuste le canal R, G et B et on reforme l'image. La fonction EqualizeImage utilise 2 fonctions : DistrbFreq(Image) qui va calculer la fréquence de chaque teinte et la fonction CumulDistrib(histo, Image) qui va créer la fonction d'histogramme cumulé. Cette derniere va donner la nouvelle indexation des teintes des pixels de l'image.
 result-00822u-Edgeless.jpg |  result-00822u-contrast.jpg |  result-001903u-Edgeless.jpg |  result-01903u-contrast.jpg | result-00299u.jpg |  result-00299u-contrast.jpg | result-00300u.jpg |  result-00300u-contrast.jpg |  result-01171u-Edgeless.jpg |  result-01171u-contrast.jpg |  result-01168u-Edgeless.jpg |  result-01168u-contrast.jpg |  result-01166u-Edgeless.jpg |  result-01166u-contrast.jpg |  result-01176u-Edgeless.jpg |  result-01176u-contrast.jpg |
 IMG1_Channels.jpg |  result-IMG1-Edgeless.jpg |  result-IMG1-contrast.jpg |
 IMG2_Channels.jpg |  result-IMG2-Edgeless.jpg |  result-IMG2-contrast.jpg |
 IMG3_Channels.jpg |  result-IMG3-Edgeless.jpg |  result-IMG3-contrast.jpg |
 IMG4_Channels.jpg |  result-IMG4-Edgeless.jpg |  result-IMG4-contrast.jpg |