HW4: Image stitching
Overview
In this howework, we are going to combine multiple images with overlapping fields of view to produce a panorama or high-resolution image.
I implemented the manual matching and automatic matching algorithm.
Method
Stitching two images needs a global homography transformation between the images.
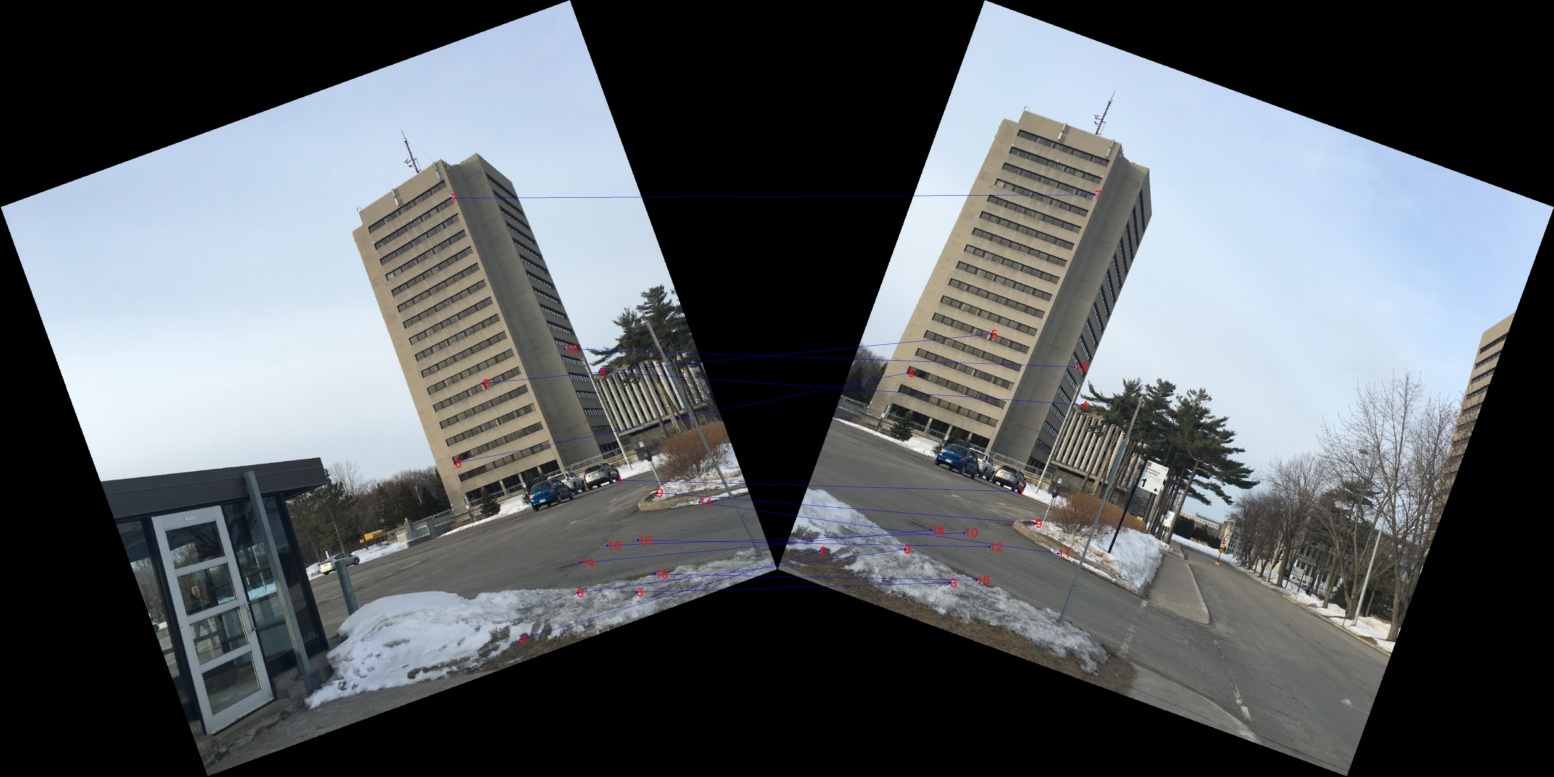
To regisiter two images, first we need to define at least 4 point pairs in both images.
For the manual matching part, we use 8 points to compute the homography H.
We also implement some part of this paper to automatically match two images.
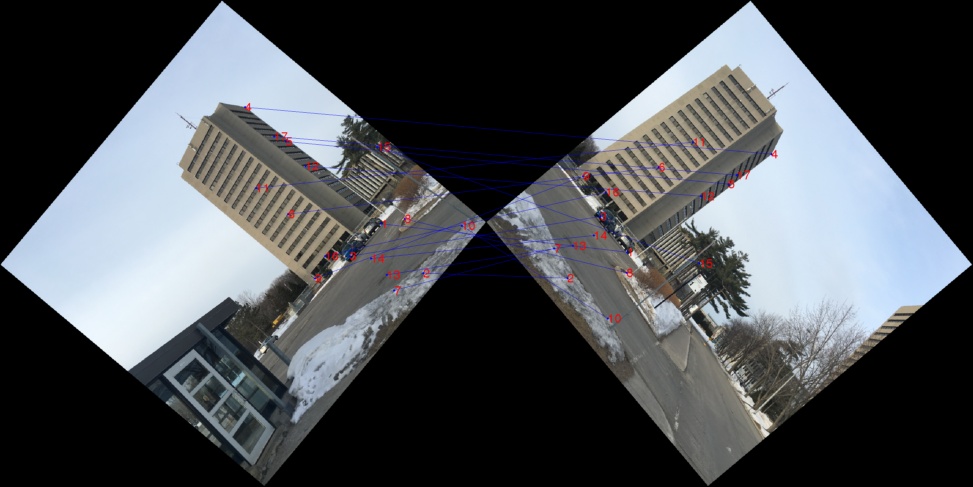
For the automatic matching method, we use harris with Adaptive Non-Maximal Suppression method in the paper to locate the corner on images.
An rotation invariable feature descriptor is used to describe the corners.
Then the squared distance between the features can be used to calculate the distance between these features.
At last the RANSAC is applied to compute a robust homography matrix H.
Result
First is the manual matching method, we test the image stitching method on 3 different scenes.
We select 8 correspondences on each image pair.
After got the homography matrix H, I warped the left image to the middle one.
Then a connected image is generated as an intermediate result.
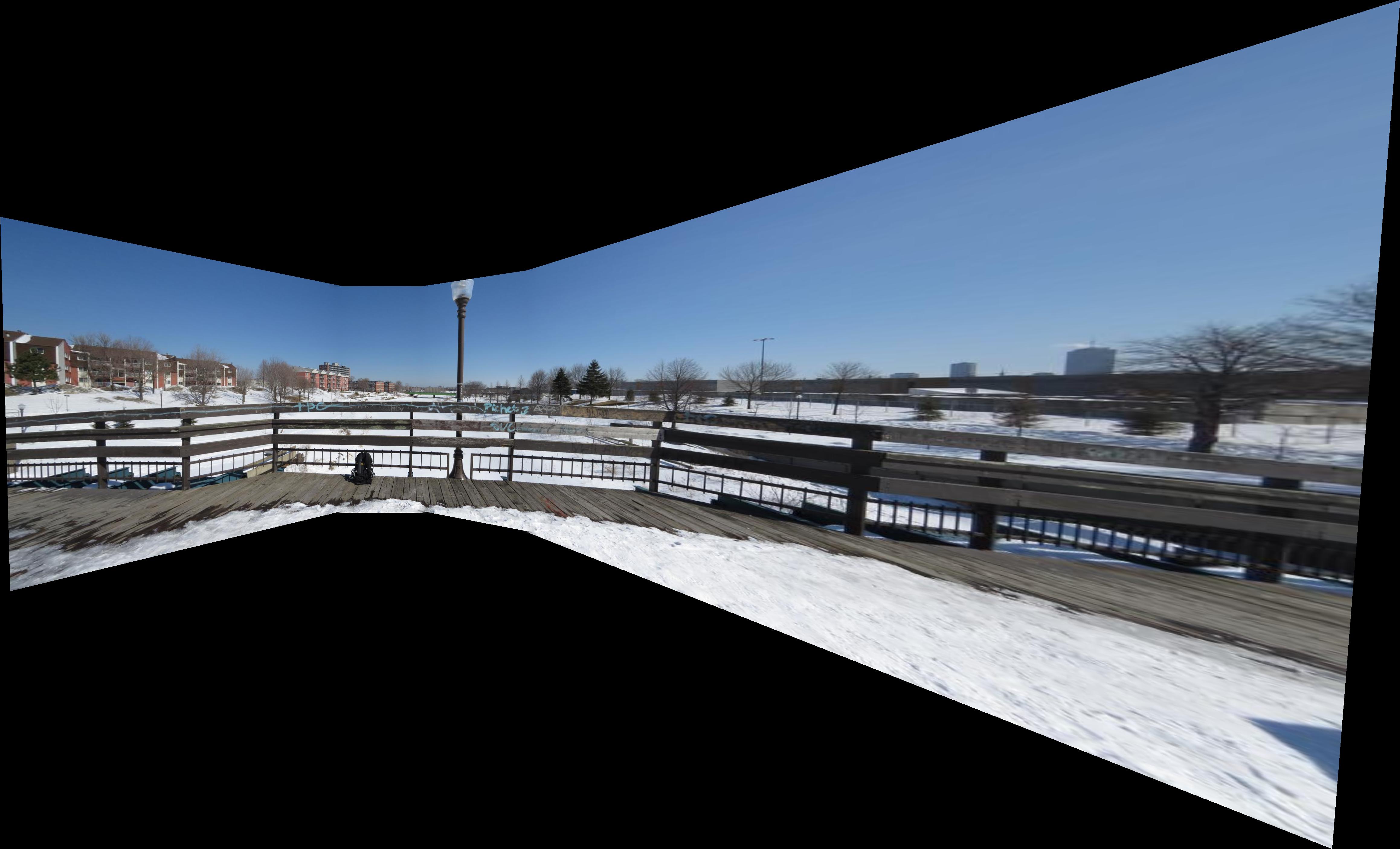
At last, the right image is also warped to the intermediate image to generate a high-resolution panorama image.
To smooth the boundary, we apply the multi-scale Laplacian pyramid blending then the panorama was cropped.
Scene1
Stitching without blending

|
Stitching with blending

|
Crop

|
Scene2
Scene3
Similar to the manual matching method, after we had the homography matrix H from the automatic matching approach, the images are warped one by one to the middle.
Scene1
Result2
My own Photo
My own Photo
Notice the rotation of the 3rd image, our feature matching method works well on this sitution.
 The 3rd take has obvious color issue.
So I adjust the white balance and intensity for the pano image, however the result is not plausible.
The 3rd take has obvious color issue.
So I adjust the white balance and intensity for the pano image, however the result is not plausible.

I also tested rotation invariance of the descriptors.
20 degree rotation
 50 degree rotation
50 degree rotation