1-Objectifs du projet 2-Description de l'algorithme d'appariement manuel 3-Description de l'algorithme d'appariement automatique 4-Rťsultats
1-Objectifs du projet
Dans le cadre de ce quatriŤme projet du cours de photographie algorithmique, il nous faut implťmenter une application
qui permet de crťer un panorama d'images ŗ l'aide de prises de vue se chevauchant. Pour effectuer l'appariement d'image, il faudra d'abord dťterminer
des points d'intťrÍts commun entre les images. Pour ce faire, il faudra utiliser une technique de sťlection manuelle de points
et une autre qui sťlectionnera des points d'intťrÍts automatiquement.
Pour plus de dťtails, voyez l'ťnoncť complet ICI.
2-Description de l'algorithme d'appariement manuel
…tape 1 - Appariement de caractťrisque
…tape 1 - Appariement de caractťrisque
Tout d'abord, il faut sťlectionner manuellement des points d'intťrÍts entre 2 images. Habituellement, on utilisera l'image du centre comme image de dťpart et on s'assurera que les points
d'intťrÍts sťlectionnťs dans les autres images (de part et d'autre du panorama) sont prťsents dans cette photo. Cependant, il est ťgalement possible de sťlectionner des points d'intťrÍts
que pour les paires d'images adjacentes et de faire le calcul de l'homographie ęen cascadeĽ. Il est important de bien dťterminer les pixels (point x,y) qui correspondent dans chaques images
puisqu'une simple erreur peu engendrer une grande erreur qui en rťsulterait d'une dťformation peu rťaliste de l'image vers le panorama.
Il est important de sťlectionner certains nombres de points afin d'obtenir de meilleurs rťsultats comme nous le verrons dans une prochaine ťtape. Pour ce faire, une fonction ŗ ťtť crťer afin
de faire la sťlection de points un-ŗ-un sur deux images et de sauvegarder la sťlection sur un fichier texte au nom des deux images combinťes. Il faut d'abord savoir combien de points on compte
utiliser.
saveAndDisplayFeatures(imgfilename1, imgfilename2, n)
…tape 2 - Calculer l'homographie
Puis, une fois les points d'intťrÍts dťterminťes, il faut dťterminer la matrice d'homographie d'images ęHĽ qui permettra la dťformation d'une image vers l'autre. Pour ce faire, il faut crťer un systŤme
de ęnĽ ťquations linťaires de la forme Ah = b oý h correspondera ŗ un vecteur des 8 inconnus de la matrice H. Comme la matrice de dťformation est de type projective, c'est la raison pour
laquelle on se retrouve avec 8 inconnus (car le 9e ťlťment de la matrice pourra Ítre simplifier et Ítre mis ŗ 1 puisqu'il correspond ŗ un facteur d'ťchelle). Pour rťsoudre de le systŤme d'ťquations, il
faudra donc au minimum 4 points d'intťrÍts.
Cependant, comme il a dťjŗ ťtť mentionnť, il faut sťlectionner le plus de points possible, le plus prťcisťment possible entre les images et de s'assurer que ceux-ci ne sont pas tous trop prŤs spatialement.
Des points tous sur la mÍme ligne de l'image ou un amassi de points au mÍme endroit n'est pas tolťrable et de prendre un minimum de points ťgalement. Dans la figure suivante, on voit le rťsultat que l'on
obtient pour une sťlection de quelques points le long d'une clotŻre en bordure d'image.
 |
 |
 |
 |
| Mauvais choix de points | Dťformation non-dťsirťe | Bon choix de points | Dťformation dťsirťe |
Pas trŤs satisfaisant si on s'en tient au minimum !
Il faut donc chercher un homographie en surestimant celle-ci ŗ l'aide de plusieurs points qui seront utilisťes pour rťsoudre plusieurs systŤmes d'ťquations et de rťsoudre ceux-ci en utilisant la mťthode des moindres carrťe. Dans Matlab, il suffit donc de crťer la matrice d'ťquations linťaires en utilisant les points d'intťrÍts de l'image source que l'on utilise sous forme homogŤne. La matrice de sortie correspond aux points de l'image de destination et il faut donc trouver les inconnus qui permettent cette transformation de faÁon fidŤle et juste. On utilisera l'opťrateur
mldivide ę\Ľ et il
faut ťgalement savoir qu'il est plus simple de travailler sous forme vectorielle pour dťfinir les ťquations linťaires et d'utiliser celle-ci sous forme d'une matrice par la suite.
Il nous ŗ donc fallu crťer la fonction ;
H = computeH(im1_pts,im2_pts)
qui permet de dťterminer l'homographie et donc, pour chaque points, on il faut reconstituer le systŤme d'ťquations ce qui mŤnera ŗ la matrice suivante:
|
h = |
|
Comme il ŗ ťtť mentionnť prťcťdemment, il est plus simple de toujours calculer l'homographie pour un mÍme plan (image de rťfťrence) et de dťformer les autres images par rapport ŗ celui-ci. Cependant, une meilleure technique serait de calculer l'homographie pour chaque paires d'images adjacentes dans le panorama et d'ťtablir l'homographie en cascade. Pour ce faire, par exemple si on 5 images et que la 3e est celle du centre, normalement, on choisirait des points d'intťrÍts pour les paires d'images suivantes (1-3, 2-3, 4-3, 5-3) pour ainsi toujours trouver des homographies en fonction de l'image centrale et donc de dťformer vers l'image 3. Cependant il est possible d'ťtablir les correspondances suivante (1-2, 2-3 ,4-3, 5-4) et de dťterminer les homographies des images non-adjacentes ŗ l'image du centre par le biais des autres homographies. Ainsi, par exemple, pour l'image 1, on calculerait l'homographie en cascade de la maniŤre suivante H12 * H23 = H13.
…tape 3 - Dťformation projective
 |
| Rťsultat de dťformation d'image |
La dťformation peut aisťmemt se calculer ŗ l'aide de la fonction Matlab
interp2 qui sera utilisť sur tout les canaux (RGB) de l'image ŗ l'aide de la fonction ;
imwarped = warpImage(allImages, allMatrixH ,X,Y)
De plus les coordonnťes d'interpolation seront donc ťtablie ŗ l'aide de l'homographie en utilisant notre fonction ;
[pts_x2, pts_y2] = useH(matrixH, pts_x, pts_y)
Il est ŗ noter, que pour ťtablir la dťformation et surtout la nouvelle image, il faut savoir le format (taille) de l'image rťsultante qui correspond ŗ la mosaÔque d'images. Pour dťterminer la format du panorama final, la fonction suivante ŗ ťtť codť ;
[X, Y] = findPanoSize(allImages, allMatrixH)
Cette fonction permet, ŗ l'aide du lot d'images et des homographies, de dťterminer l'emplacement des quatres coins de l'image rťsultante et par le fait mÍme, de connaÓtre sa dimension. En effet, en effectuant un ęforward-warpingĽ que sur les coins des images et il est donc possible de dťterminer les coins minimaux et maximaux en X et Y quicorrespondent aux quatres coins du panorama.
 |
 |
| Image destination (rťfťrence) | Image source (ŗ dťformer) |
…tape 4 - Fusionner les images en une mosaÔque
Pour fusionner les images entre elles, il ne suffit pas toujours de les superposer car on remarque trop l'effet de ęcollageĽ de photos. Une maniŤre de contrer cet effet, est d'utiliser une moyenne pondťrťe sur chacuns
des pixels qui se chevauchent. Une fonction ŗ donc ťtť programmť dans le but d'accomplir cette t‚che :
[panoramaFinal] = createPano(imgWarped)
En y insťrant les images dťformťes, cette fonction additionne les pixels qui se chevaucheront et dťtermine le nombre de chevauchement par pixels afin d'obtenir la moyenne pondťrťe des images. Il suffit de superposer les images par la
suite.
3-Description de l'algorithme d'appariement automatique
…tape 1 - Dťtection de caractťrisques de coins dans une image
…tape 1 - Dťtection de caractťrisques de coins dans une image
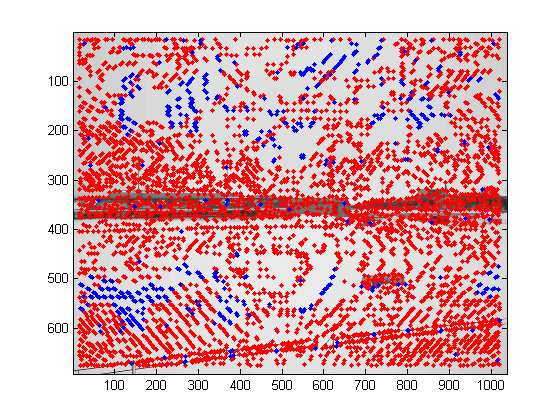 |
| Points d'Harris |
Dans un premier temps, pour trouver les coins caractťrisques d'une image, on utilisera l'algorithme d'Harris qui est un classique en matiŤre de dťtection de coins.
Il es possible de faire la dťtection ŗ plusieurs ťchelle bien que dans le but de ce projet ce n'est pas nťcessaire que nous utiliseront la fonction existante suivante:
function [newy,newx,newv] = harris(imrgb, nbPtsHarris, robust)
Cette fonction a ťtť modifiťe lťgŤrement de son originale puisqu'elle comprend maintenant une section qui permet de choisir le nombre de points ŗ retenir pour faire
l'homographie. De plus, elle implťmente maintenant la rťpression adaptive non-maximale qui permet de faire la sťlection le plus judicieusement possible, c'est ŗ dire de maniŤre uniforme et pour des points trŤs distincts. Cette technique
est un peu complexe mais fonctionne trŤs bien. On tri d'abord les coins/points selon leurs ęforcesĽ et le maximum global sera notre points d'entrťe. En formant un certain rayon autour de ce point qu'on ťlargit peu ŗ peu, on obtient d'autres
points maximaux qui doivent respecter le critŤre de robustesse (variable d'entrťe de la fonction). On trouve donc le rayon minimal en utilisant la fonction pdist2 et ainsi obtenir le nombre de points dťsirťs avec des ęforcesĽ suffisament ťlevťs.
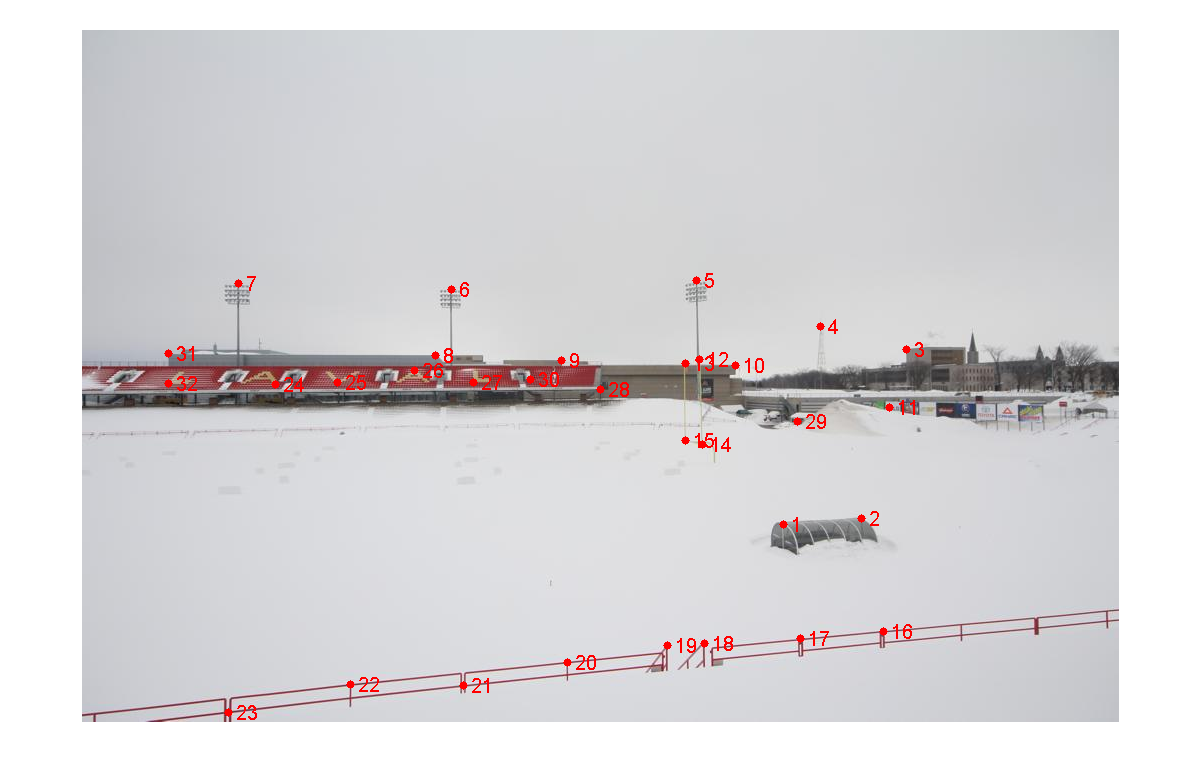
Dans l'image ŗ droite, on peut voir les milliers de points en ROUGE qui correspondent aux points de Harris crťer par la fonction, puis en BLEUE, les points sťlectionnťs en utilisant la technique de rťpression adaptive non-minimale.
…tape 2 - Extraire un descripteur pour chaque point caractťristique
Une fois les sťries de points dťterminťs dans chacunes des images du panorama, il est important dans dťterminer un descripteur. Les descripteurs sont des groupements de pixels de 8x8 pris autour des points caractťristique d'Harris qui dťcrivent
en quelque sorte, l'identitť du pixel dans le but de faire l'appariement. Bien qu'il est favorable d'utiliser l'invariance en rotation de ces descripteurs puisque la prise de photos n'est pas toujours parfaitement ędroitĽ et sans rotation, cette technique
n'a pas ťtť utilisť. Cependant dans le but de rendre plus rapide les calculs, on utilise ces descripteurs sur une plus grande fenÍtre de dimension 40x40 soit 5x plus grand et lťgŤrement flou. La fonction suivante permet de faire cette ťtape :
[descripteurs] = getDescript(image, ptsHarris)
Comme indiquer cette fonction applique d'abord un flou sur l'image ŗ l'aide de imfilter, puis on transforme un domaine spatiale de afin d'obtenir 5 pixels pour un (8x8 - 40x40) ŗ l'aide de meshgrid.
Finalement, il suffit d'interpoler les points en utilisant interp2 et surtout, de ne pas oublier de normaliser les points avec le gain et le biais (moyenne (mean) et variance sqrt(var(...)) des descripteurs).
…tape 3 - Apparier ces descripteurs de caractťristiques entre les deux images
ņ l'aide de la fonction suivante il est possible d'apparier les diffťrents descripteurs provenant des diffťrents lots de points de Harris dťterminťs auparavant.
[ptsDest, ptsSource] = matchDescript(descript1,descript2,ptsHarris1,ptsHarris2)
Cette fonction utilise la fonction de distance (pdist2) pour dťterminer la distance entre les paires de descripteurs. Pour l'appariement il suffit d'utiliser le plus proche voisin ou d'utiliser la technique de Lowe qui calcule
le rapport entre les 2 plus proches voisins du descripteur. Voir le fichier suivant pour plus de dťtails.
…tape 4 - Utiliser une mťthode robuste (RANSAC) pour calculer l'homographie
Finalement, aprŤs avoir apparier les descripteurs caractťrisques les uns avec les autres, il faut estimer l'homographie. Cette t‚che peut Ítre trŤs longue si on utilise tous les points de Harris, ou mÍme tous les points d'intťrÍts sťlectionnťes. Pour
ce faire, il existe l'algorithme de RANSAC (RANdom SAmple Consensus) qui n'est pas trŤs difficile ŗ implťmenter. Par itťration (plus le nombre sera grand, plus l'algorithme sera robuste), on prend alťatoirement 4 points pour en dťterminer l'homographie
en plus de dťterminer le nombre de points qui satisfait l'appariement. La tolťrance d'erreur des pixels peut Ítre modifiť dans la fonction suivante qui effectue l'algorithme de RANSAC et qui retourne la meilleure homographie d'image :
[matrixH] = findRANSAC(ptsDest, ptsSource)
4-Rťsultats
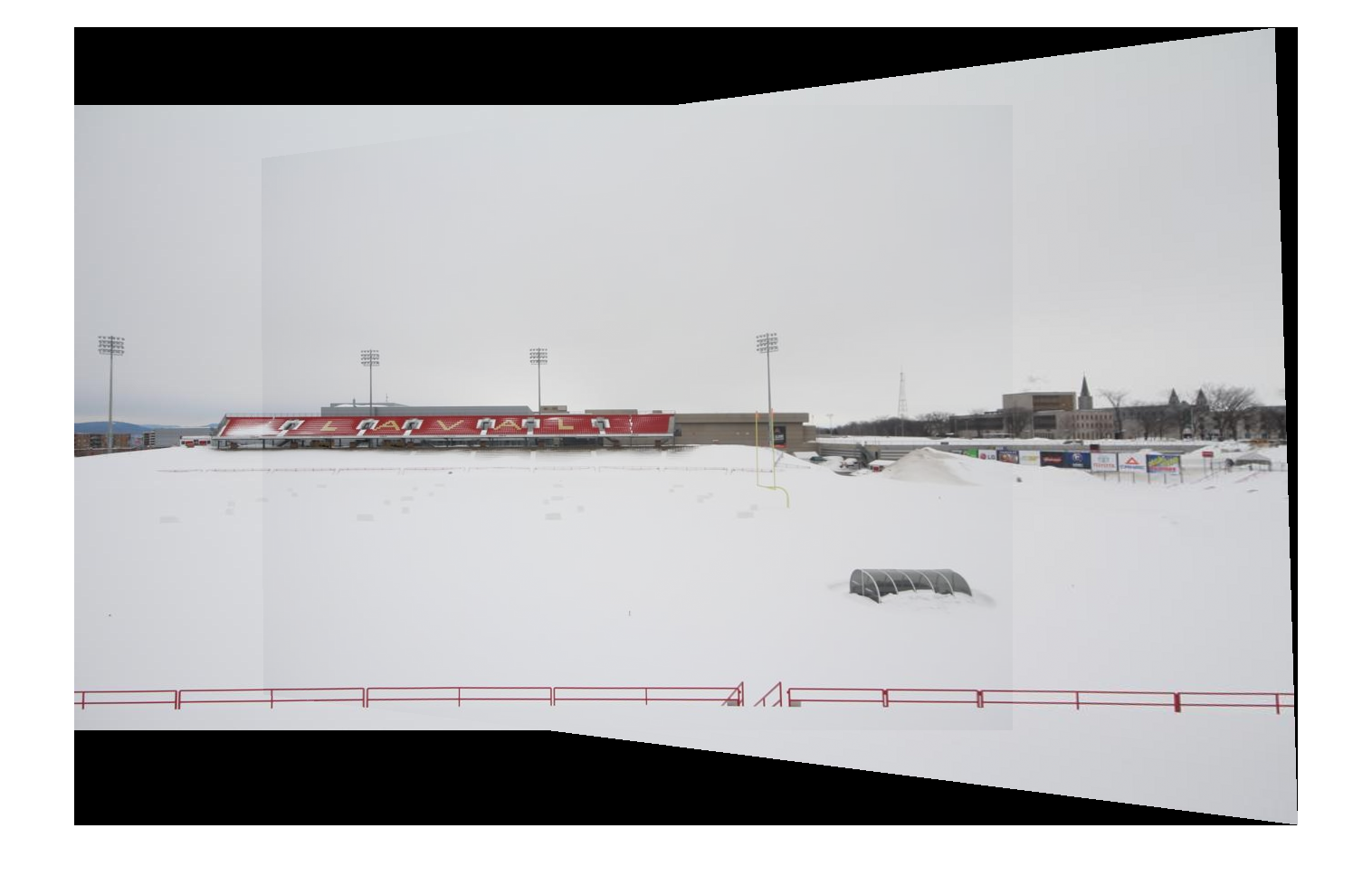
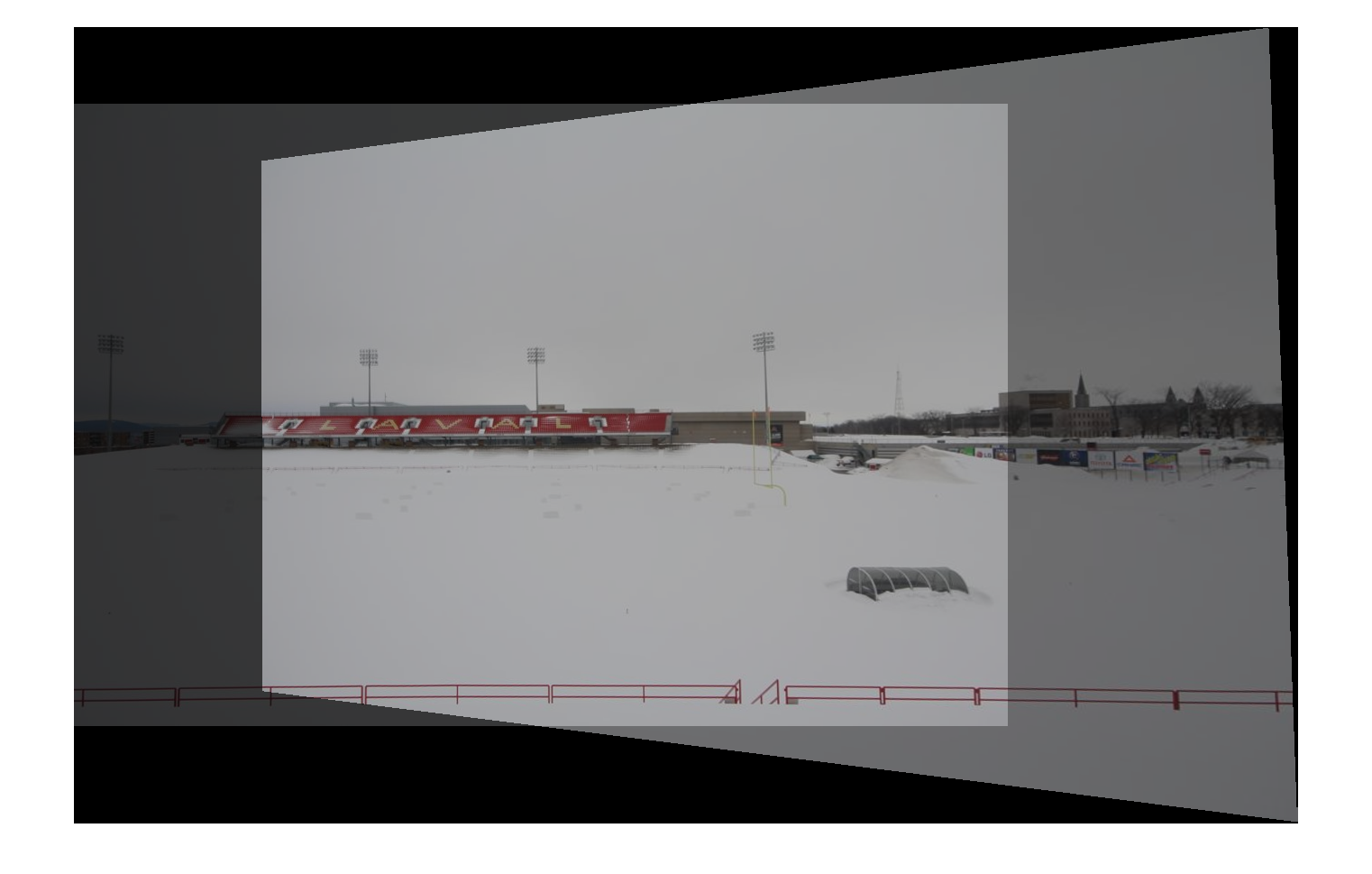
Dans le but d'allťger le site web, les panoramas ont ťtť simplifiťs
 |
| Stade du Rouge et Or |
 |
| Grand Axe de l'universitť |
 |
| Linges |
Comme on le remarque sur cette derniŤre photo, lorsque la lumiŤre varie beaucoup, il est difficile pour l'algorithme de bien dťtecter les points qui sont semblable et aussi le fait qu'il manque un peu de coins dans l'image n'aide pas beaucoup ŗ avoir un beau panorama final.
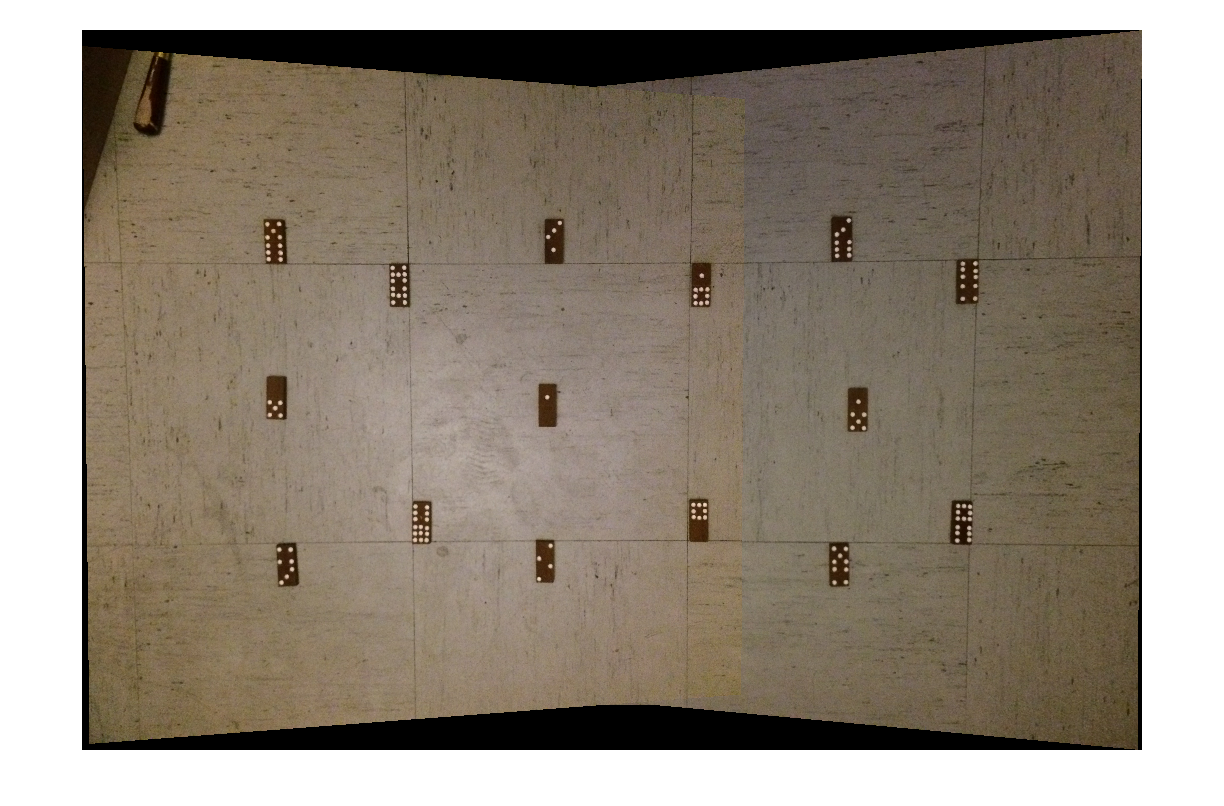 |
| Dominos |
Comme on le remarque sur la photo prťcťdente, en prťsence de forts points d'intťrÍts/coins et le fait que ceux-ci soient en bons nombres, on trouve une correspondance quasi-parfaite.