Laval University
Computational
Photography
Homework
1 – Colorizing the Russian Empire
by
Maxime Leclerc
February 1st 2015
Table of
contents
Project description
Approach
Single
scale algorithm results
Multiple
scale algorithm results
Additional
Prokudin-Gorskii results
Personal
photos results
Problems
encountered and solutions
Why
are some images not aligned properly
Bells
and whistles – Automatic contrast
Bells
and whistles – Automatic border cropping
Project
description
Sergei
Mikhailovich Prokudin-Gorskii (1863-1944) was a Russian chemist and a
pioneer in color photography. His photographic method was to divide the
visible
color spectrum into three channels using red, green and blue
filters. This project aims to automatically combine these three
channel colors into a single color image.
Red, green and blue
filters. Source: uic.edu
Approach
The
first thing the application does is to loop through all available JPG
and TIF files. For each source file, we splits its content into three
color channels: red, green and blue. We then automatically enhance the
image's contrast. Please
refer to the bell
and whistles – automatic
contrast section for additional
details about this process.
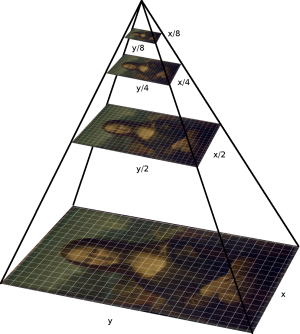
The next
step is to align the three channels. We first check if the image is
larger than 500 pixels. If that's the case, we recursively re-size
the image half its size until we get an image smaller that is than 500
pixels. This multi-scale representation allows us to speed up
computations on large images and is referred to as a pyramid
representation.
Pyramid
representation. Source: psu.edu
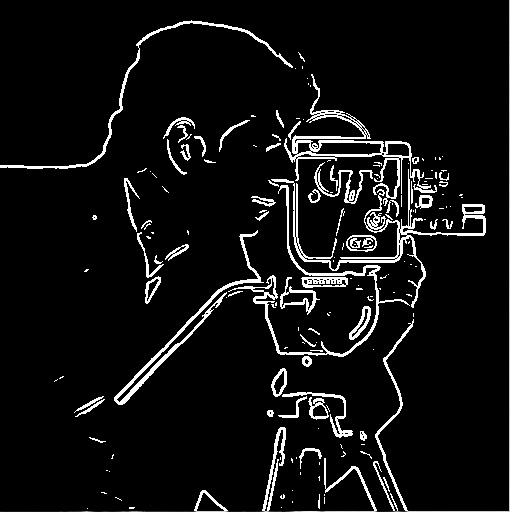
Before
doing additional calculations, we simplify our color channels by
transforming them into binary representations of the
channels' edges. We use the Sobel
method to perform this
transformation. Please note that the
Sobel method was used for this course
by three students in 2014: Diane
Fournier, Jingwei
Cao and Tom
Toulouse. It was also used by many Berkeley students for a Computational Photography course: Bilenko, Hall, Tang, etc. Using binary edge
channels instead of gray scale
channels improves our application's results in terms of quality
and speed.
For each
re-sized or original image, we compute the sum of
square differences
(SSD) for different red-blue and green-blue channel alignments. The
pyramid representation allows us to use a smaller search space for
each image size. As a result, we compute the SSD for translations in
the X and Y axes ranging only from -15 pixels to 15 pixels. In
addition,
we only compute the SSD for a 300 by 300 pixel region located around
the center of each image. These two simplifications allow us to
speed up computation, especially on large images.

The
result of these calculations gives us the best alignment for the
three color channels. We simply keep the alignment that has a minimum
SSD - that is, our channel difference metric - over all the computed
alignments. Note
that when we switch from a small image to a larger image in our
pyramid representation, we use the small image's alignment estimate as
a starting
point to find the best alignment for the larger image.
Once the
original channels have been aligned, we then automatically crop the
image's border. Please refer to the bell and whistles
–
automatic border cropping section for additional details
about this
process.
Single
scale algorithm results
|

Calculated red offsets: X = 9, Y = -1.
Calculated green offsets: X = 4, Y = 1.
|
|

Calculated
red offsets: X = 5, Y = 5.
Calculated
green offsets: X = 2, Y = 3.
|
|

Calculated
red offsets: X = 12, Y = 0.
Calculated
green offsets: X = 6, Y = 1.
|
|

Calculated
red offsets: X = 4, Y
= 3.
Calculated
green offsets: X = 2, Y = 2.
|
|

Calculated
red offsets: X = 6, Y
= 0.
Calculated
green offsets: X = 2, Y = 0.
|
|
Calculated
red offsets: X = 13, Y
= -1.
Calculated
green offsets: X = 1, Y = -1.
|
|

Calculated
red offsets: X = 4, Y
= 2.
Calculated
green offsets: X = 1, Y = 1.
|
|

Calculated
red offsets: X = 12, Y
= 1.
Calculated
green offsets: X = 5, Y = 1.
|

Calculated
red offsets: X = 14, Y
= 4.
Calculated
green offsets: X = 6, Y = 2.
|
Multiple
scale algorithm results

Calculated
red offsets: X = 87, Y
= 38.
Calculated
green offsets: X = 35, Y = 19.
|

Calculated
red offsets: X = 108, Y
= 68.
Calculated
green offsets: X = 49, Y = 51.
|

Calculated
red offsets: X = 52, Y
= 38.
Calculated
green offsets: X = 34, Y = 25.
|
Calculated
red offsets: X = 85, Y
= 32.
Calculated
green offsets: X = 42, Y = 6.
|

Calculated
red offsets: X = 48, Y
= 13.
Calculated
green offsets: X = 14, Y = 5.
|

Calculated
red offsets: X = 123, Y
= 34.
Calculated
green offsets: X = 56, Y = 25.
|

Calculated
red offsets: X = 43, Y
= 6.
Calculated
green offsets: X = 16, Y = 5.
|

Calculated
red offsets: X = 12, Y
= 20.
Calculated
green offsets: X = -15, Y = 10.
|

Calculated
red offsets: X = 71, Y
= 34.
Calculated
green offsets: X = 23, Y = 20.
|
Additional
Prokudin-Gorskii results
|

Calculated red offsets: X = 14, Y = 5.
Calculated green offsets: X = 6, Y = 3.
|
|
Calculated
red offsets: X = 5, Y = 5.
Calculated
green offsets: X = 2, Y = 3.
|
|

Calculated
red offsets: X = 11, Y = 3.
Calculated
green offsets: X = 5, Y = 2.
|
|

Calculated
red offsets: X = 13, Y
= 4.
Calculated
green offsets: X = 6, Y = 3.
|
|

Calculated
red offsets: X = 10, Y
= -4.
Calculated
green offsets: X = 5, Y = -1.
|
|

Calculated
red offsets: X = 69, Y
= 8.
Calculated
green offsets: X = 13, Y = -4.
|
|
Calculated
red offsets: X = 119, Y
= -15.
Calculated
green offsets: X = 53, Y = -4.
|
|

Calculated
red offsets: X = 152, Y
= -6.
Calculated
green offsets: X = 39, Y = -1.
|

Calculated
red offsets: X = 129, Y
= 25.
Calculated
green offsets: X = 59, Y = 14.
|

Calculated
red offsets: X = 113, Y
= -24.
Calculated
green offsets: X = 43, Y = -9.
|
Personal
photos results
We tested out algorithms on our own photos. As expected, the best
results we get are when there is no movement in the scene and when the
camera does not move. Here are some before and after images:
|
Before

|
After
Calculated
red offsets: X = 4, Y
= 1.
Calculated
green offsets: X = 11, Y = 1.
 |
|
Before

|
After
Calculated
red offsets: X = 24, Y
= -1.
Calculated
green offsets: X = 27, Y = -1.
 |
|
Before

|
After
Calculated
red offsets: X = 12, Y
= 2.
Calculated
green offsets: X = 13, Y = 1.
 |
Problems
encountered and solutions
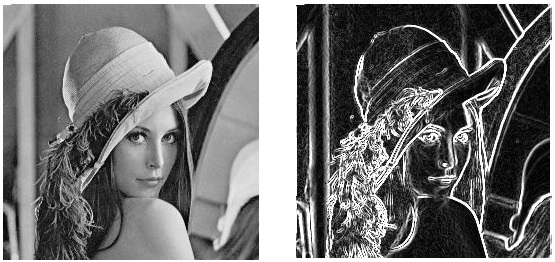
The first problem we encountered was that a simple color channel
comparison did not give good alignment results. This explains why we
decided to transform the color channels into edge
images with the Sobel
method. Using this simplified representation gives much
better alignment results than the results we had with raw
images.
Sobel
edge detection. Source: umn.edu
Next, we had to do some trial and error
when we developed the automatic
contrast operation. We had to chose among many different
contrast transformations. We had poor results with some transformations
and decided to pick a hybrid solution that combined the best results in
a single image. See the section below for details about the final
solution. Finally, we had to tweak a few threshold values when we
created the automatic
border cropping. See the last section for additional
details on this process.
Why are some
images not aligned properly
We can see that our algorithms are not entirely robust for all images.
For example,
the following image doesn't seem to be aligned properly:
One possible explanation could be that the woman in
the middle as well as the trees and the clouds located on the left side
moved while the photographer was changing the color filters. We also
see some hard to avoid human movement
in the next photo featuring three
young women. Most of the image seems to be correctly aligned except for
the region around the young women:
Bells
and whistles – Automatic contrast
To
automatically improve image contrast, we use a simple histogram
equalization and a contrast-limited adaptive histogram
equalization
(CLAHE). This gives us two new image versions in addition to the
original version. After some testing, we found that each of these
three image versions contributed interesting visual information not necessarily
present in the other two image versions. As a result, we decided to
average the original image with these two histogram equalizations in
order to benefit from all three versions' visual information content.
Here are some before and after images:
|
Before automatic contrast

|
After automatic contrast
|
The left image above had too much yellow in it. The
image to the right corrected this issue.
|
Before

|
|
We could barely see the clouds in the left image above.
However, the clouds are now visible in image to the right.
|
Before

|
|
The first image had too much red in it. The second image seems more
realistic.
Bells
and whistles – Automatic border cropping
For
the automatic border cropping process, we first compute the difference
between each channel. We then sum these differences across all the
image's rows and columns. This gives us two
vectors: a vector
containing the sum of
channel differences for each horizontal
row
and one
containing the sum of channel differences for each vertical
column.
Here's a short pseudo code example:
borderDiff = channelDifference( Red, Green ) + channelDifference( Red, Blue )
+ channelDifference( Blue, Green );
sumBorderX = sumOverX( borderDiff );
sumBorderY = sumOverY( borderDiff );
Please note that a
similar cropping method was used in 2014 by Peng Xue for a Berkeley Computational Photography course. In adition, Tom
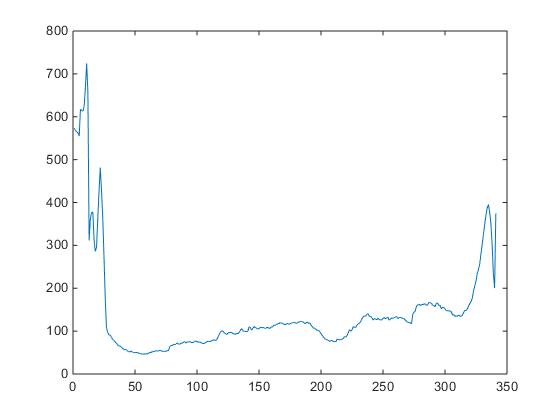
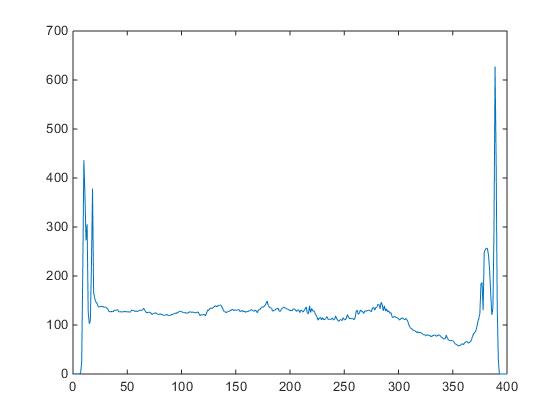
Toulouse also used a similar method for this course in 2014. Here are sample plots for a given image of
these two summed difference vectors - one summed
horizontally, the other summed vertically.
From these plots, we
can clearly see that the summed
difference
is higher in the first and
last few rows as well as in the first
and last few columns.
|
Channel difference summed over X
|
Channel difference summed over Y
 |
Next, to automate
the
cropping process, we need to chose thresholds
that work well for most
images. We have two goals here: 1) Preserve interesting visual information and 2) Cut
the image where it is inconsistent.
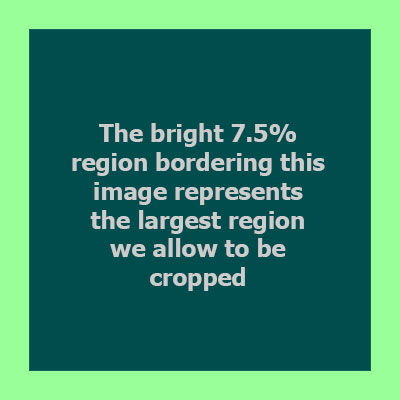
Preserve interesting visual information
One threshold we implemented is used to
limit the maximum
region we allow to be cropped. After
some tweaking, a value that seems to work well is to limit
the
cropping to a portion of 7.5%
of the total image size for each cropping region
(at the top,
bottom, left and right). This threshold ensures that we don't crop the
image
too much and that we don't
lose interesting visual information.
Cut
the image where it is inconsistent
A difference
value above the mean value indicates that
the region
is dissimilar across the three channels. After some tweaking, we
found that using 115% of the mean value was a better threshold than
using the actual mean value when we crop the test
images.
In other words, we want to crop
a border region when this region
has a channel
difference
metric higher than 115% times the metric mean.
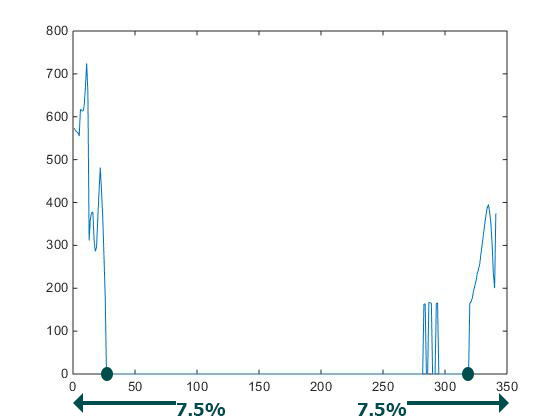
|
Original border difference summed over X
|
Selected X values greater than 115% x mean value
The arrows and circles at the bottom represent approximations of the search operations and results.
 |
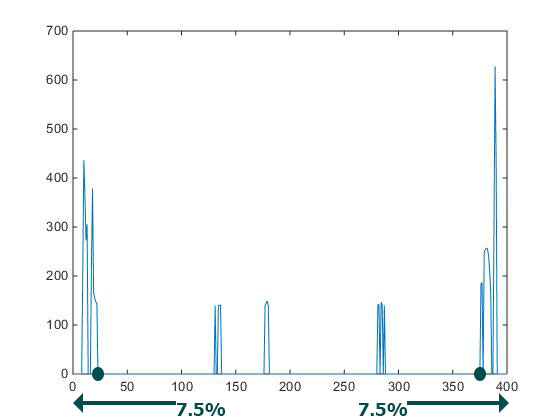
|
Original border difference summed over Y
|
Selected Y values greater than 115% x the mean value
The arrows and circles at the bottom represent approximations of the search operations and results.
 |
With
that in mind, we crop the image using the
rightmost above
average value. Remember that we limit ourselves to the region corresponding
to the first 7.5% portion of
each vector. We
also crop the image using the leftmost
above average value.
Again, we limit ourselves to the region corresponding
to the
last 7.5% portion of each summed difference vector.
maxCropRegion = 7.5%;
firstCroppedX = findFirstVectorElement( vectorSearched = selectedXValues,
findFirstVectorElement > 0, searchDirection = 'fromRightToLeft',
startAt = ( lengthVectorX * maxCropRegion ) );
Here are some
before and after images:
|
Before cropping

|
|
The first image had yellow, blue, black and white bands before
cropping. The second image got rid of these bands.
|
Before

|
|
The image on the left had pink, blue, black and white regions before
the application cropped it. This has been fixed in the image on the
right.
|
Before
|
|
Once more, the automatic cropping removed the blue/yellow/green,
black and white bands.

{kind=link}
{kind=link}
{kind=link}
{kind=link}